Componentele electronice
La ce ne referim prin componente electronice?
Componentele electronice reprezintă o gamă destul de largă de produse. În primul rând, este vorba despre actuatoare (motoare și servomotoare), mai exact mașinării ce produc mișcare.
În al doilea rând, este vorba despre senzorii folosiți pentru ca robotul să poată înțelege mediul înconjurător. Nu în ultimul rând, ne referim la sistemul de control, cel care face posibilă utilizarea tuturor celorlaltor componente menționate anterior.
Motoare
Motoarele sunt cele mai puternice actuatoare pe care le avem la dispoziție în FTC. Mai mulți dintre furnizorii principali au propriile lor motoare la vânzare, însă la bază toate sunt la fel. Cele mai des folosite sunt motoarele Modern Robotics 12VDC.

Motor Modern Robotics 12VDC

Motor GoBilda 13.7:1
Pentru a putea înțelege mai bine motoarele este nevoie de câteva concepte de bază:
- Cuplul - forța pe care o poate exercita un motor la capătul unui braț de 1cm. Se măsoară în kg⋅cm sau N⋅m
- RPM - numărul de rotații pe minut pe care îl realizează un motor la curent maxim. Acesta este invers proporțional cuplului.
- Rație - numărul de rotații care intră, raportat la câte ies.
De exemplu 13.7:1 înseamnă că pentru fiecare 13.7 rotații ale motorului, vom avea o rotație la ieșire. Rațiile permit oarecum modificarea specificațiilor motorului.
Această rație de 13.7:1 face ca motorul să fie de 13.7 ori mai lent, însă îi oferă un cuplu de 13.7 ori mai mare. În general vom întâlni două tipuri de rații - interne și externe.
Cele interne sunt cele realizate de cutia de viteze a motorului.
Cele externe sunt cele realizate prin transmisii pe curele, roți dințate sau orice altceva. Astfel putem obține orice viteză/cuplu dorim pentru un anumit mecanism.
Curbele de performanță ale motoarelor
Foarte multe lucruri în lumea reală nu sunt liniare. În general este suficient să aproximăm marea majoritate folosind liniaritatea, însă cred că este mai important să întelegem cum funcționează de fapt motoarele.
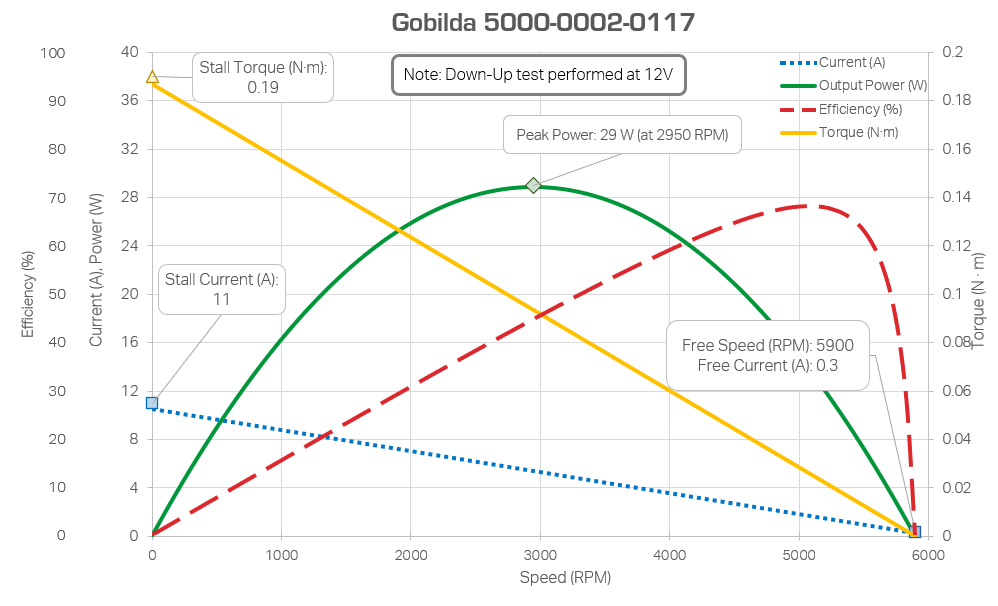
Curba de performanță
Acest grafic ilustrează evoluția puterii unui motor, cu cât este aplicată mai multă forță pe el, până la maximul pe care îl poate duce.
Cifrele pentru RPM și cuplu nu sunt de la sine relevante, deoarece acestea se schimbă odată cu rația aplicată pe motor. Ce este cel mai important de ținut cont, este faptul că motorul produce cea mai mare putere la jumătate din cuplul său maxim.
Concluzia care trebuie trasă de aici este că, pentru un mecanism care vrem să ruleze la potențial maxim, rația optimă este cea care oferă cuplu dublu față de forța aplicată pe motor. Această opțiune însă, nu este mereu cea corectă și vom vedea la secțiunea despre baterie și curent de ce.
Există și câteva calculatoare publice care pot fi folosite pentru a determina cu aproximare rația adecvată unor mecanisme des folosite în FTC:
- ILITE Drivetrain Calculator - folosit pentru a determina rația pe care ar trebui să o folosim pentru un șasiu
- Linear Mechanism Calculator - folosit pentru a determina rația cea mai bună pentru mecanisme liniare, cum ar fi lifturile
Bune practici
Ceva de care ar trebui să ținem cont, este protejarea motoarelor. Practici bune în acest scop sunt:
- Evitarea direct drive - direct drive înseamnă atașarea mecanismului pe care îl
angrenează direct pe axul motorului.
Această practică expune motorului la daune interne, dar și la îndoirea axului în cazul în care sunt aplicate în mod direct șocuri pe acesta. Alternativa constă în folosirea de transmisii externe despre care vom discuta în secțiunea următoare. - Gestionarea consumului de curent - consumul de curent crește odată cu forța aplicată
pe un motor.
Conform curbei de performanță, puterea maximă produsă de motor se află la jumătate din cuplul maxim. În general, nu este bine să depășim acest prag, deoarece începem să pierdem și din performanța mecanismului și să consumăm excesiv de mult curent, punând astfel sub risc motorul. - Atenția la blocaje - dacă un motor nu se mai poate mișca, însă continuă să fie
alimentat, acesta va continua să tragă din ce în ce mai mult curent până când va
reuși să se miște sau se va arde.
De aceea, ar trebui să avem foarte mare grijă, în special din punct de vedere al programării, în momentul în care lucrăm cu motoare.
Servouri
Servo-urile la bază sunt tot niște motoare, însă cu un comportament destul de diferit. Există două moduri diferite pentru servo-uri:
- CRServo(Continuous Rotation Servo) - acest mod se comportă exact ca un motor.
- Servo - acest mod oferă un control foarte precis al poziției. Din punct de vedere software, le pot fi atribuite valori între 0.0 și 1.0, acestea reprezentând o poziție undeva în intervalul maxim pe care îl suportă. Există servo-uri cu intervale de 180, 270, 360 de grade, dar și unele care oferă mai multe rotații complete, până chiar la 7 rotații.
Servo Axon Max

Servo Plex Torque
Conceptele de cuplu, RPM și rație rămân oarecum la fel. Mai apare în plus conceptul de viteză unghiulară. În general o să îl întâlnim sub forma de secunde/60°, reprezentând timpul necesar pentru a parcurge 60° de rotație.
Un lucru inedit la servo-uri este posibilitatea de a folosi un servo programmer pentru a seta și testa range-ul de folosire al acestuia. În cazul anumitor servo-uri, de exemplu cele Axon, ele folosesc un program pe calculator prin care poți controla mai multe setări.
Bune practici
Comparativ cu motoarele, servo-urile sunt și mai fragile, necesitând și mai multă atenție în folosirea lor. Din punct de vedere al bunelor practici, evitarea direct drive rămâne în continuare o prioritate. De asemenea, mai există varianta de a fi protejate montând un rulment undeva de-a lungul atașamentului servo-ului, pentru a-i oferi încă un punct de susținere.
Un aspect foarte important de prevenit sunt șocurile. În general, brațele în FTC sunt
angrenate folosind servo-uri, iar tendința generală este să folosim brațe destul de lungi,
deoarece pot simplifica anumite sarcini ale jocului. În acele situații totuși, șocul în
momentul în care brațul încearcă să se oprească devine foarte mare, riscând stricarea
servo-urilor.
Aici putem implementa conceptul de counter-springing, folosind un arc sau
un elastic pentru a reduce din inerție, reducând șocul final. Puteți vedea implementarea
în acest filmuleț folosind câteva arcuri pe un braț. De asemenea, acest workshop ținut de
echipa 14361 Robolobos ilustrează mai multe implementări de counter-springing și pentru
alte tipuri de mecanisme.
Acest filmuleț realizat de echipa 18438 Wolfpack Machina explică și prezintă utilizarea corectă a servo-urilor în FTC.
Senzori
Senzorii sunt o parte foarte importantă în FTC pentru a obține un robot fiabil, fie că este vorba de perioada de autonomie sau cea de teleoperare.
Encodere
Pentru perioada de autonomie, aspectul cel mai important este localizarea. În acest sens, există niște senzori ce poartă numele de encoder. Scopul lor este măsurarea poziției de rotație.
La ce ne poate folosi acest lucru? De exemplu, în cazul localizării, folosim o roată care merge de-a lungul terenului odată cu robotul. Dacă știm câte unități s-a rotit această roată, putem face conversia în cm pentru a afla cât de mult s-a deplasat robotul nostru. Encoderele nu sunt folosite doar în cazul localizării robotului.
Ele pot fi folosite și pentru a determina cât de mult s-a extins un lift, folosind rotația motorului de exemplu. Encoderele îți permit să cunoști starea în care se află un mecanism. Există 2 tipuri principale de encoder:
- Relativ - acesta are la început o valoare 0, iar deplasarea este determinată față de acel 0 arbitrar.
- Absolut - acesta are un interval de 360 de grade și oferă poziția pe acel interval, similar cu poziția servo-urilor. În momentul în care depășește cele 360 de grade, începe iarăși de la 0.
Encoder de motor

Encoder extern
Camere
Un element nelipsit din jocurile FTC este utilizarea de computer vision folosind o cameră. Aceasta poate fi folosită pentru detectarea unor elemente specifice perioadei de autonomie, sau pentru detectarea elementelor de joc pentru a fi colectate eficient și punctate.
De asemenea, pe marginile terenului se mai află niște imagini, similare cu niște coduri QR, numite april tag-uri. Folosind biblioteca incorporată de computer vision, este foarte ușor să obținem poziția relativă față de ele. Astfel, cunoscând poziția lor absolută pe teren, putem determina poziția robotului pe teren destul de ușor.

Logitech C920

Alți senzori
Alți senzori sunt deseori folosiți pentru a determina stările unor mecanisme ale robotului sau ale elementelor de joc.

Senzor de distanță

Senzor de culoare

Break beam-uri

Buton
Protocoale de comunicare
Senzorii pot folosi mai multe protocoale de comunicare:
- Digital
- Analogic
- I²C
- Cuadratură
De ce trebuie să ținem cont de ele? Deoarece există o diferență importantă între I²C și celelalte. Timpul de citire al protocolului I²C este mult mai lung decât al celorlaltor protocoale, astfel încetinind viteza codului robotului. Din această cauză, ar trebui evitați pe cât posibil senzorii I²C.
IMU
IMU este un modul ce permite măsurarea orientării față de cele 3 axe ale sistemului tridimensional, dar și alți parametrii precum accelerația și viteza pe fiecare axă. Un astfel de IMU este integrat în Control Hub, însă trebuie ținut cont că acesta folosește protocolul I²C.
Există, de asemenea, alte 2 produse foarte interesante ce conțin un IMU:
- Pinpoint - un calculator care, folosind 2 roți ce măsoară deplasarea robotului și un IMU poate determina poziția absolută a robotului în teren.
- OTOS (Optical Tracking Odometry Sensor) - un senzor optic care, folosind un IMU și o serie de imagini cu suprafața terenului calculează poziția robotului în teren.
Sistemul de control
Sistemul de control este creierul robotului. Acesta rulează codul pe care îl scriem, și controlează toate celelalte componente electronice.
Control Hub și Expansion Hub
Control Hub-ul este partea principală a sistemului de control. Acesta este conectat la Driver Station (telefonul care preia instrucțiunile de la driveri și le transmite robotului) prin Wi-Fi. Pe el rulează o versiune minimală de Android și o aplicație (Robot Controller) care se ocupă de gestionarea comenzilor primite și le transmite mai departe la celelalte componente electrice.
Expansion Hub-ul este practic o extensie a Control Hub-ului, oferind aceleași porturi, însă fără capacitatea de a fi conectat prin Wi-Fi și fără sistemul de operare.

Control Hub

Expansion Hub
Din punct de vedere calitativ, au câteva lipsuri, care pot prezenta probleme. În principal, trebuie să ținem cont de următoarele lucruri:
- Nu folosiți portul USB 2.0 - acesta este conectat la placa de rețea, iar o problemă des întâlnită este ca odată cu o descărcare electrică suferită pe acest port, să se ardă placa de rețea, făcând imposibilă conectarea prin Wi-Fi la Control Hub, această componentă devenind complet inutilă. Puteți citi mai multe aici.
- Porturile de encoder - din cauza electronicii interne, porturile de encoder 0-3 se comportă diferit față de porturile 1-2, porturile 1-2 fiind limitate la numărul de impulsuri pe care le pot măsura. Puteți citi mai multe în această postare și resursele de acolo care prezintă mai bine cauza problemei.
- Porturile de servo - acestea sunt conectate între ele două câte două (0-1, 2-3 și 4-5) și pot
scoate în total 4A de curent pe 2 porturi, de aceea ar trebui să aveți grijă ce și
unde mufați în momentul în care folosiți servo-uri mai puternice (Axon, Plex etc.).
Dacă unul dintre porturi se strică în vreun fel, nici cel asociat lui nu va mai funcționa.
Bateriile și curentul
Bateriile în FTC vin cu o serie de specificații de bază, indiferent de modelul sau de furnizorul de la care au fost cumpărate. Acestea funcționeaza la 12V și pot oferi un curent de până la 20A.

Baterie
Pentru a avea un robot fiabil, este important să avem grijă la consumul de curent al robotului în orice scenariu.
Un consum prea mare de curent la un moment dat, poate duce la brownout. În general, un robot alimentează constant și simultan cel puțin 6 motoare care suferă forțe relevante, ducând la un consum minim de curent deja destul de ridicat, luând în calcul bugetul maxim de 20A.
Astfel, trebuie implementate soluții mecanice pentru a mai reduce din acest consum, fie prin alegerea unor rații mai "conservative" ale motoarelor în cadrul mecanismelor, fie folosind counter-springing pentru a reduce din forța aplicată asupra actuatoarelor.
Un alt parametru care afectează consumul de curent este rezistența internă a bateriei. Analizorul de sănătate a bateriei ne permite măsurarea acesteia. O rezistență internă mai mică, permite robotului să tragă mai mult curent din baterie. Această postare conține și o secțiune despre consumul de curent și bugetarea acestuia.
Servo Power Module și Servo Hub
Servo Power Module și Servo Hub sunt două componente de electronică ce permit alimentarea a 6 servo-uri cu 6V, în loc de cei 5V furnizați de Control Hub și de Expansion Hub.
Principalul beneficiu al lor este creșterea specificațiilor de viteză și cuplu ale servo-urilor, oferind un bonus de performanță cu costul a unui consum de curent puțin mai mare.

Servo Power Module

Servo Hub
SPM a fost primul apărut și prezintă două posibile probleme:
- Predispoziția la scurt circuit - pentru a evita asta este recomandată acoperirea conectorilor șurub și a porturilor rămase goale cu bandă adeziva, deoarece orice reziduu metal poate provoca un scurt circuit.
- Curentul total furnizat redus - curentul pe care îl poate furniza un SPM este de 15A.
Scopul principal de utilizare al său este alimentarea de servo-uri cu consum ridicat,
iar de exemplu servo-urile Axon și Plex care definesc această categorie au consumul
maxim de câte 4A fiecare, astfel fiind limitat la alimentarea a 4 servo-uri în loc de
maximul de 6.
Aceasta nu este neapărat o problemă, deoarece consumul acestor servo-uri nu va atinge în mod realist 4A vreodată, însă este recomandat să tratăm totul ca în cazul extrem, pentru a evita apariția de defecțiuni foarte ușoare de prevenit.
Servo Hub-ul a venit ca o îmbunătățire asupra SPM-ului, rezolvând problemele de scurt circuitare, simplificând procesul de cablare și aducând alte câteva feature-uri de finețe. Curentul maxim este tot de 15A, însă după cum am spus, nu este o problemă în adevăratul sens al cuvântului, doar o limitare care ar trebui respectată.